Published: Pacific Graphics 2017
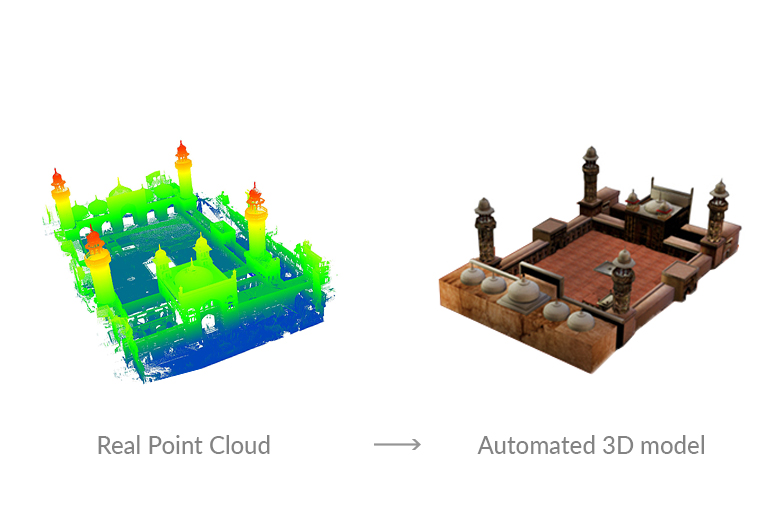
Recent advancements in 3D scanning technologies have paved way for generation of highly accurate 3D scenes in the form of point cloud data. For the segmentation and reconstruction of such scenes, a number of techniques have been introduced in literature. Our approach is a hybrid technique for the segmentation and 3D reconstruction of LiDAR point cloud data, primarily focusing on 3D outdoor scenes. Our model, the hierarchical tree, iteratively divides the point cloud into segments, simultaneously using a novel energy function and a 3D convolutional neural network, HollowNets to classify the segments. We have tested the efficacy of our proposed approach using real data of two sites obtained from Leica Scan Station P20 Terrestrial Laser Scanner and found an accuracy of 95% for domes and minarets.
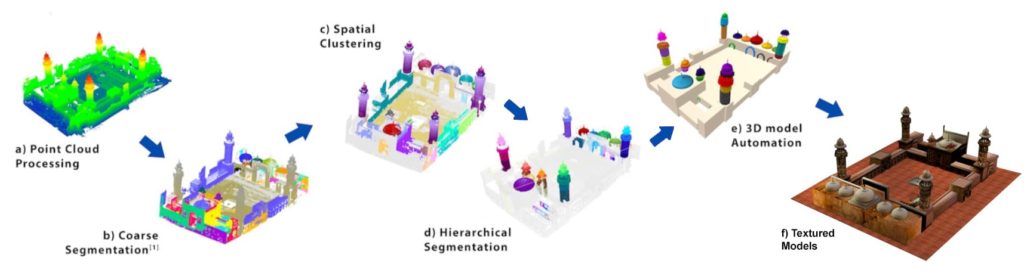
The Process
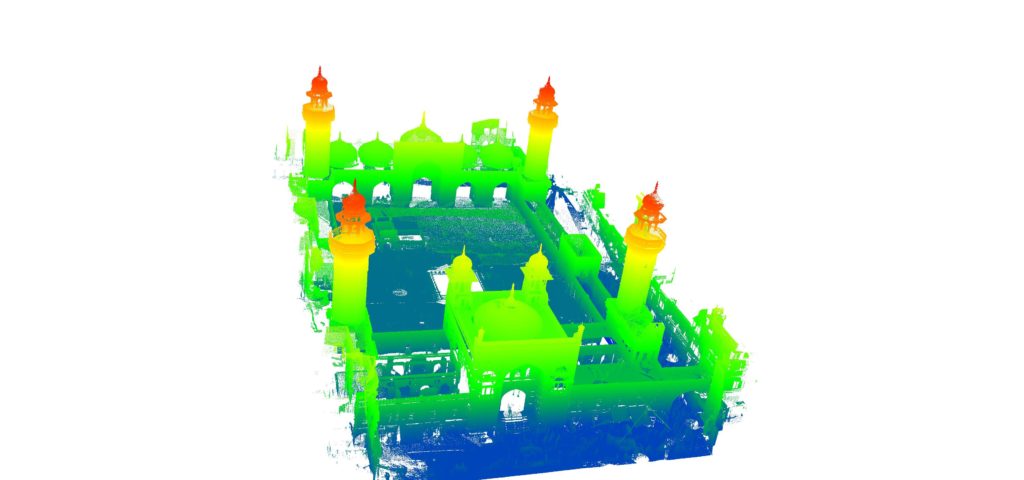
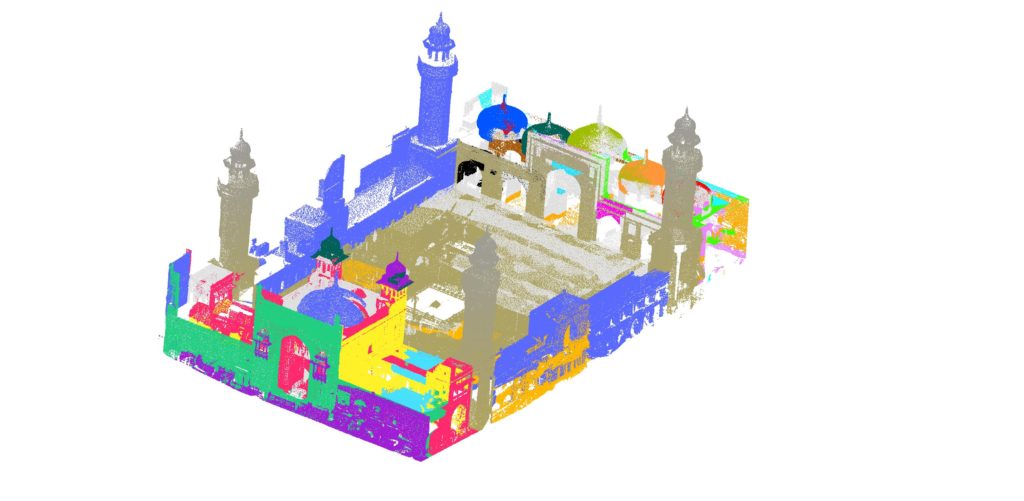
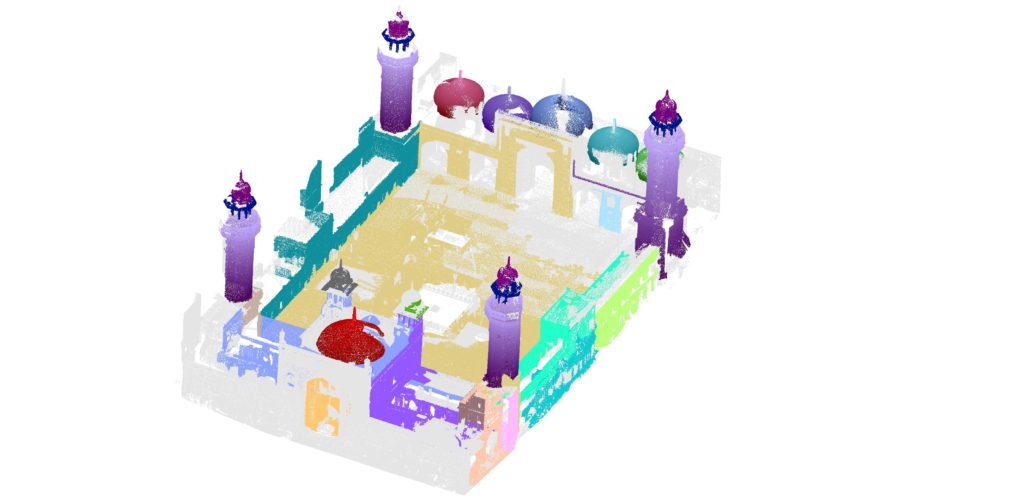
Site: Masjid Wazir Khan


Conclusion
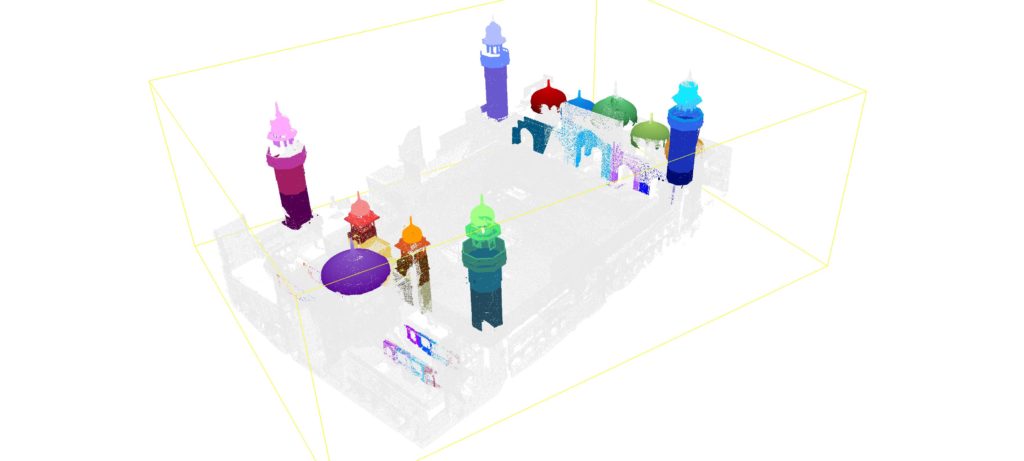
We evaluated our algorithm on real data which was obtained from Leica Scan Station P20 Terrestrial Laser Scanner. Two sites were scanned using P20 namely Masjid Wazir Khan (MWK) in Lahore, and Masjid Khudabad (MKA) in Dadu. The details of these sites and obtained results are shown here. The higher accuracy in case of domes and minarets is due to their rotational symmetry. Each segment is substituted using an architectural primitive based on the class labels and its size to create a 3D CAD model.
[/kc_column_text][/kc_column][/kc_row]
Applications

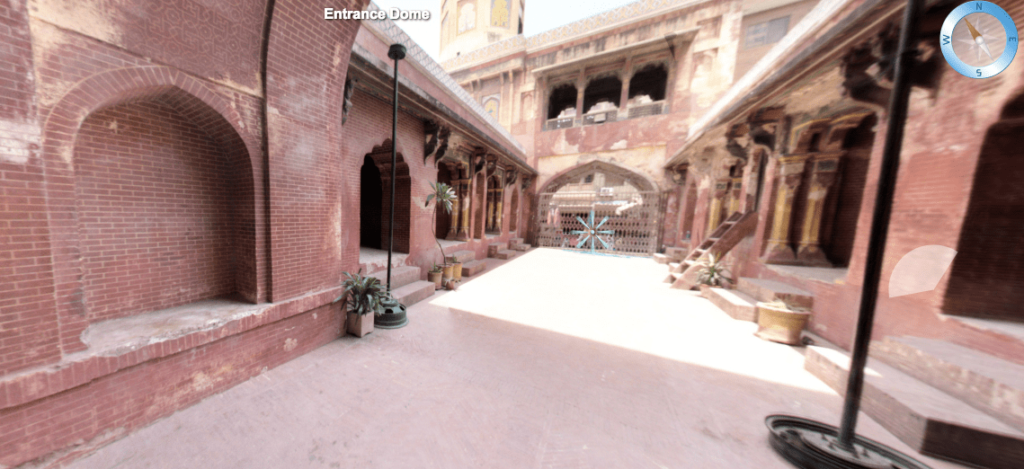

This process takes a real world sites and preserves it in the digital realm. The end product can easily be used to make digital walkthroughs and even virtual reality experiences for the audiences and generations to come. Another interesting aspect of our work is that we can change the type of architecture with the click of a button e.g we can view a Mughal era mosque in the assets of the trinity church.